Design Principles¶
Distributions are the fundamental building blocks of a POMDP.
Essentially, a POMDP describes the interaction between an agent and the environment. The interaction is formally encapsulated by a few important generative probability distributions. The core of pomdp_py is built around this understanding. The interfaces in
pomdp_py.framework.basicsconvey this idea. Using distributions as the building block avoids the requirement of explicitly enumerating over \(S,A,O\).
–
POMDP = agent + environment
Like above, the gist of a POMDP is captured by the generative probability distributions including the
TransitionModel,ObservationModel,RewardModel. Because, generally, \(T, R, O\) may be different for the agent versus the environment (to support learning), it does not make much sense to have the POMDP class to hold this information; instead, Agent should have its own \(T, R, O, \pi\) and the Environment should have its own \(T, R\). The job of a POMDP is only to verify whether a given state, action, or observation are valid. SeeAgentandEnvironment.
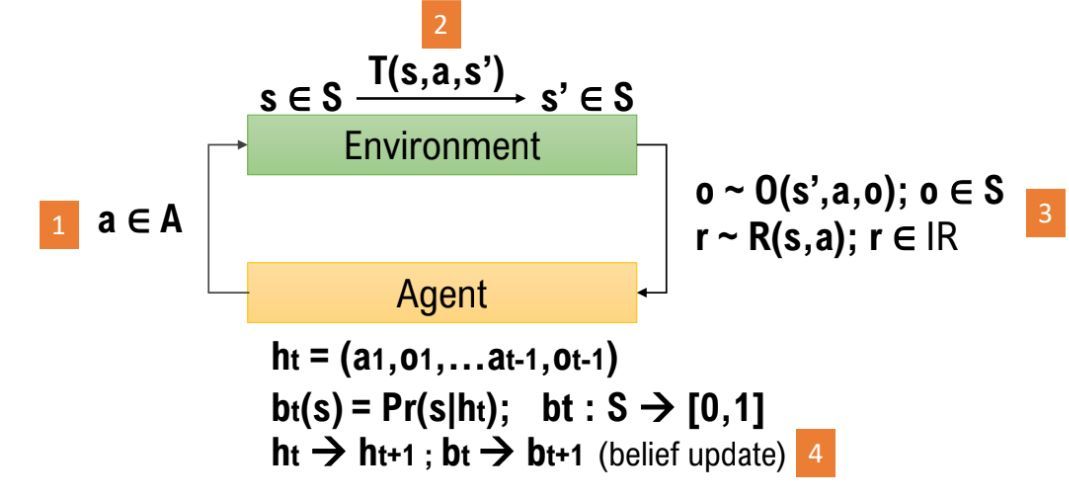
A Diagram for POMDP \(\langle S,A,\Omega,T,O,R \rangle\). (correction: change \(o\in S\) to \(o\in\Omega\))¶